หุ่นยนต์อุตสาหกรรมมีความยืดหยุ่นและความแม่นยำสูงเป็นพิเศษ ความต้องการสภาพแวดล้อมการทำงานต่ำ การดำเนินงานที่ยั่งยืน คุณภาพผลิตภัณฑ์ที่เสถียร และประสิทธิภาพสูง โรงงานได้นำหุ่นยนต์ขนถ่ายวัสดุ Yaskawa 6 แกน GP12 มาใช้เพื่อสร้างระบบขนถ่ายวัสดุในสายการประกอบอัตโนมัติ
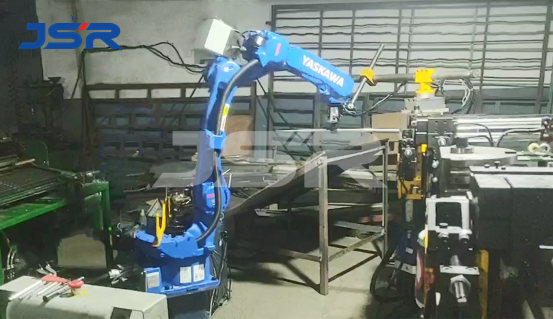
นี่คือบริษัทที่ทำธุรกิจเกี่ยวกับอะไหล่จักรยาน และ GP12 รับผิดชอบงานขนถ่ายและขนถ่ายแฮนด์จักรยาน เขาต้องเคลื่อนย้ายท่อเหล็กจากจุด A ไปยังเครื่องดัดท่อ หลังจากดำเนินการเสร็จแล้ว เครื่องดัดท่อจะนำท่อเหล็กออกมาและเคลื่อนย้ายไปยังจุด B ซึ่งต้องดำเนินการอย่างแม่นยำ
การดำเนินการตามโปรแกรม:
1. วิศวกรจะต้องวางแผนเค้าโครงและก่อสร้างอย่างเหมาะสมตามสภาพแวดล้อมการทำงานจริงของไซต์งานลูกค้า
2. ดำเนินการเดินสายโต้ตอบสัญญาณตามสัญญาณที่อุปกรณ์ภายนอกสนามและหุ่นยนต์ต้องการ
3. เขียนโปรแกรมตรรกะของหุ่นยนต์และสอนการเคลื่อนที่ของหุ่นยนต์
4. การทดสอบโปรแกรมตอบสนองความต้องการการควบคุมและความต้องการการผลิต
5. ดำเนินการติดตั้งและแก้ไขจุดบกพร่องในสถานที่ให้เสร็จสมบูรณ์ และให้การฝึกอบรมการใช้งานอุปกรณ์แก่ลูกค้า
6. หลังจากทำงานเพียงไม่กี่วัน อุปกรณ์ในสถานที่ก็จะมีอัตราความล้มเหลวเป็นศูนย์ ซึ่งสามารถตอบสนองการผลิตต่อเนื่อง 24 ชั่วโมงของโรงงานได้
หุ่นยนต์จัดการช่วยลดความเข้มข้นของแรงงานของคนงาน ปรับปรุงการผลิตและประสิทธิภาพการทำงาน รับรองความปลอดภัยส่วนบุคคลของคนงาน และตระหนักถึงระบบอัตโนมัติ ความชาญฉลาด และความเป็นมนุษย์ Jiesheng ยินดีที่จะมอบโซลูชันระบบอัตโนมัติของหุ่นยนต์อุตสาหกรรมที่ปรับแต่งตามความต้องการสำหรับลูกค้าแต่ละราย

เวลาโพสต์: 9 พ.ย. 2565
