เมื่อเร็วๆ นี้ ลูกค้ารายหนึ่งของ JSR ได้ปรับแต่งโครงการถังแรงดันสำหรับเชื่อมด้วยหุ่นยนต์ ชิ้นงานของลูกค้ามีรายละเอียดหลากหลายและมีชิ้นส่วนที่ต้องเชื่อมจำนวนมาก ในการออกแบบโซลูชันแบบบูรณาการอัตโนมัติ จำเป็นต้องยืนยันว่าลูกค้ากำลังทำการเชื่อมแบบต่อเนื่องหรือการเชื่อมแบบจุด แล้วจึงใช้หุ่นยนต์ทั้งหมด ในช่วงเวลานี้ ผมพบว่าลูกค้ามีข้อสงสัยเกี่ยวกับการเลือกอุปกรณ์กำหนดตำแหน่ง JSR จึงได้แนะนำอุปกรณ์นี้ให้ทุกคนทราบโดยสังเขป
ตัววางตำแหน่งพลิกแนวตั้งแบบแกนเดี่ยวและหางปลาแบบสถานีคู่
VS เครื่องวางตำแหน่งพลิกแนวตั้งสามแกน
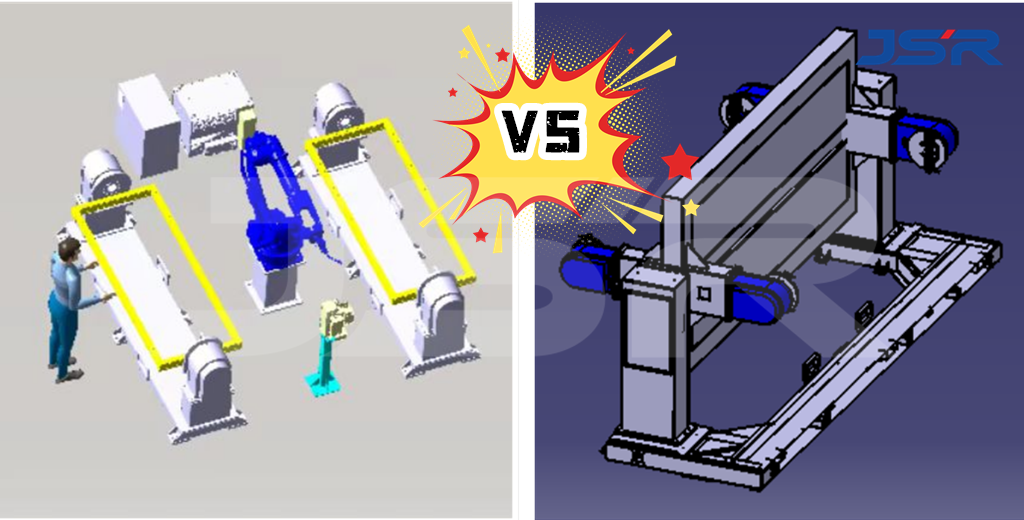
ในสถานีงานเชื่อมหุ่นยนต์ อุปกรณ์วางตำแหน่งพลิกแนวตั้งหัวสต็อกและหางสต็อกแกนเดี่ยวแบบสถานีคู่ และอุปกรณ์วางตำแหน่งพลิกแนวตั้งสามแกนเป็นอุปกรณ์วางตำแหน่งทั่วไปสองแบบ และมีข้อดีของตัวเองในสถานการณ์การใช้งานที่แตกต่างกัน
ต่อไปนี้เป็นสถานการณ์การใช้งานและการเปรียบเทียบ:
เครื่องวางตำแหน่งเฟรมหัวและท้ายแกนเดี่ยวแบบสถานีคู่:
เหมาะสำหรับสถานการณ์ที่จำเป็นต้องหมุนและจัดวางชิ้นงานระหว่างกระบวนการเชื่อม ตัวอย่างเช่น ในสายการผลิตเชื่อมตัวถังรถยนต์ สามารถติดตั้งชิ้นงานสองชิ้นพร้อมกันได้สองสถานี และสามารถหมุนและจัดวางชิ้นงานได้โดยใช้หัวแกนเดี่ยวและตัวกำหนดตำแหน่งท้ายเครื่อง ซึ่งช่วยเพิ่มประสิทธิภาพการผลิต
https://youtube.com/shorts/JPn-iKsRvj0
เครื่องวางตำแหน่งพลิกแนวตั้งสามแกน:
เหมาะอย่างยิ่งสำหรับสถานการณ์การเชื่อมที่ซับซ้อนซึ่งจำเป็นต้องมีการหมุนและการพลิกชิ้นงานในหลายทิศทาง ตัวอย่างเช่น ในอุตสาหกรรมการบินและอวกาศ จำเป็นต้องมีการเชื่อมลำตัวเครื่องบินที่ซับซ้อน เครื่องวางตำแหน่งพลิกแนวตั้งสามแกนสามารถหมุนและพลิกชิ้นงานได้หลายแกนทั้งในแนวนอนและแนวตั้ง เพื่อตอบสนองความต้องการในการเชื่อมในมุมที่แตกต่างกัน
https://youtu.be/v065VoPALf8
การเปรียบเทียบข้อดี:
เครื่องวางตำแหน่งเฟรมหัวและท้ายแกนเดี่ยวแบบสถานีคู่:
- โครงสร้างเรียบง่าย ใช้งานและบำรุงรักษาง่าย
- สามารถประมวลผลชิ้นงานสองชิ้นในเวลาเดียวกันเพื่อปรับปรุงประสิทธิภาพการผลิต
- เหมาะสำหรับงานเชื่อมบางประเภทที่ง่ายกว่า เช่น ชิ้นงานที่ต้องมีแกนหมุนเพียงแกนเดียว
- ราคาถูกกว่าเครื่องวางตำแหน่งพลิกแนวตั้งสามแกน
- การเชื่อมจะสลับไปมาระหว่างสถานีซ้ายและขวา เมื่อเชื่อมที่สถานีหนึ่ง คนงานจะต้องโหลดและขนถ่ายวัสดุที่อีกด้านหนึ่ง
เครื่องวางตำแหน่งพลิกแนวตั้งสามแกน:
- สามารถหมุนและพลิกได้หลายแกน และเหมาะสำหรับงานเชื่อมที่ซับซ้อน
- ในระหว่างการเชื่อมด้วยหุ่นยนต์ คนงานจะต้องทำการโหลดและขนถ่ายชิ้นงานเพียงด้านเดียวเท่านั้น
- ให้ความยืดหยุ่นและความแม่นยำในการวางตำแหน่งมากขึ้น ซึ่งสามารถตอบสนองความต้องการของมุมการเชื่อมต่างๆ ได้
- เหมาะสำหรับชิ้นงานที่ต้องการคุณภาพการเชื่อมและความแม่นยำสูง
โดยสรุป การเลือกตำแหน่งที่เหมาะสมจะขึ้นอยู่กับข้อกำหนดงานเชื่อมโดยเฉพาะ รวมถึงปัจจัยต่างๆ เช่น ความซับซ้อนของชิ้นงาน มุมเชื่อม ประสิทธิภาพการผลิต และข้อกำหนดด้านคุณภาพการเชื่อม
เวลาโพสต์: 20 ก.พ. 2567
