-

เมื่อเลือกเครื่องเชื่อมสำหรับสถานีงานหุ่นยนต์เชื่อม คุณควรพิจารณาปัจจัยต่อไปนี้: u การใช้งานการเชื่อม: กำหนดประเภทของการเชื่อมที่คุณจะดำเนินการ เช่น การเชื่อมแบบป้องกันแก๊ส การเชื่อมด้วยอาร์ก การเชื่อมด้วยเลเซอร์ เป็นต้น สิ่งนี้จะช่วยกำหนดประเภทการเชื่อมที่ต้องการ...อ่านเพิ่มเติม-
-

เมื่อเลือกชุดป้องกันสำหรับหุ่นยนต์พ่นสี ควรพิจารณาปัจจัยต่อไปนี้: ประสิทธิภาพในการป้องกัน: ตรวจสอบให้แน่ใจว่าชุดป้องกันสามารถป้องกันสีกระเด็น สารเคมีกระเด็น และอนุภาคต่างๆ ได้อย่างมีประสิทธิภาพ การเลือกวัสดุ: ให้ความสำคัญกับวัสดุที่...อ่านเพิ่มเติม-
-

ข้อกำหนดการใช้งาน: กำหนดงานและการใช้งานเฉพาะที่หุ่นยนต์จะถูกใช้งาน เช่น การเชื่อม การประกอบ หรือการจัดการวัสดุ การใช้งานที่แตกต่างกันจำเป็นต้องใช้หุ่นยนต์ประเภทต่างๆ ความสามารถในการรับน้ำหนัก: กำหนดน้ำหนักบรรทุกสูงสุดและระยะการทำงานที่หุ่นยนต์ต้องการ...อ่านเพิ่มเติม-
-
หุ่นยนต์อุตสาหกรรมกำลังพลิกโฉมวิธีการผลิตของเราอย่างก้าวกระโดด พวกมันกลายเป็นรากฐานสำคัญของอุตสาหกรรมการผลิต นำมาซึ่งการเปลี่ยนแปลงครั้งสำคัญในหลายภาคส่วน นี่คือรายละเอียดสำคัญบางประการเกี่ยวกับวิธีที่หุ่นยนต์อุตสาหกรรมกำลังปรับเปลี่ยนกระบวนการผลิตของเรา: การเพิ่มผลผลิต...อ่านเพิ่มเติม-
-

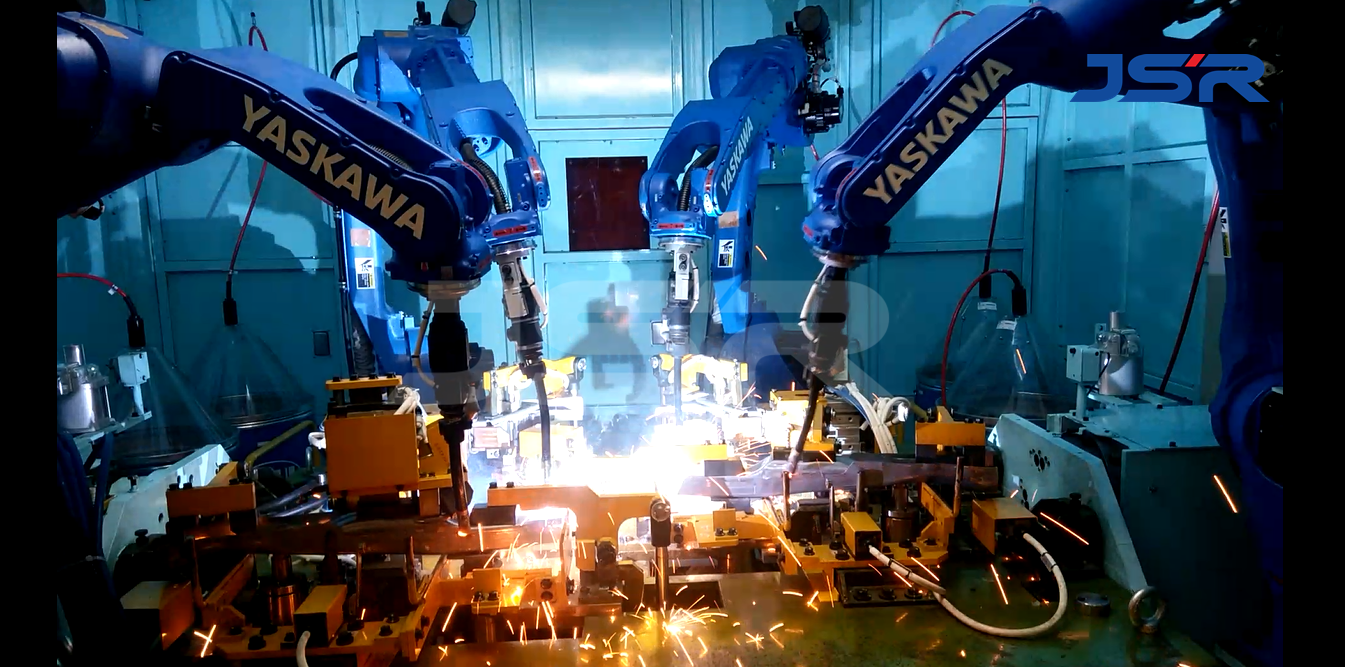
หุ่นยนต์ซึ่งเป็นหัวใจสำคัญของการบูรณาการระบบอัตโนมัติทางอุตสาหกรรม ถูกนำไปใช้อย่างแพร่หลายในหลากหลายอุตสาหกรรม ช่วยให้ธุรกิจต่างๆ มีกระบวนการผลิตที่มีประสิทธิภาพ แม่นยำ และเชื่อถือได้ ในอุตสาหกรรมการเชื่อม หุ่นยนต์ Yaskawa เมื่อใช้ร่วมกับเครื่องเชื่อมและตัวกำหนดตำแหน่ง จะสามารถบรรลุประสิทธิภาพสูง...อ่านเพิ่มเติม-
-

การค้นหาตะเข็บและการติดตามตะเข็บเป็นสองฟังก์ชันที่แตกต่างกันที่ใช้ในระบบอัตโนมัติสำหรับงานเชื่อม ทั้งสองฟังก์ชันมีความสำคัญต่อการเพิ่มประสิทธิภาพและคุณภาพของกระบวนการเชื่อม แต่ทั้งสองฟังก์ชันทำงานแตกต่างกันและใช้เทคโนโลยีที่แตกต่างกัน ชื่อเต็มของการค้นหาตะเข็บ...อ่านเพิ่มเติม-
-

ในภาคการผลิต เวิร์กเซลล์งานเชื่อมได้กลายเป็นส่วนสำคัญในการสร้างรอยเชื่อมที่แม่นยำและมีประสิทธิภาพในการใช้งานที่หลากหลาย เวิร์กเซลล์เหล่านี้ติดตั้งหุ่นยนต์เชื่อมที่สามารถทำงานเชื่อมที่มีความแม่นยำสูงได้ซ้ำๆ ความคล่องตัวและประสิทธิภาพของเวิร์กเซลล์ช่วยลดการผลิต...อ่านเพิ่มเติม-
-
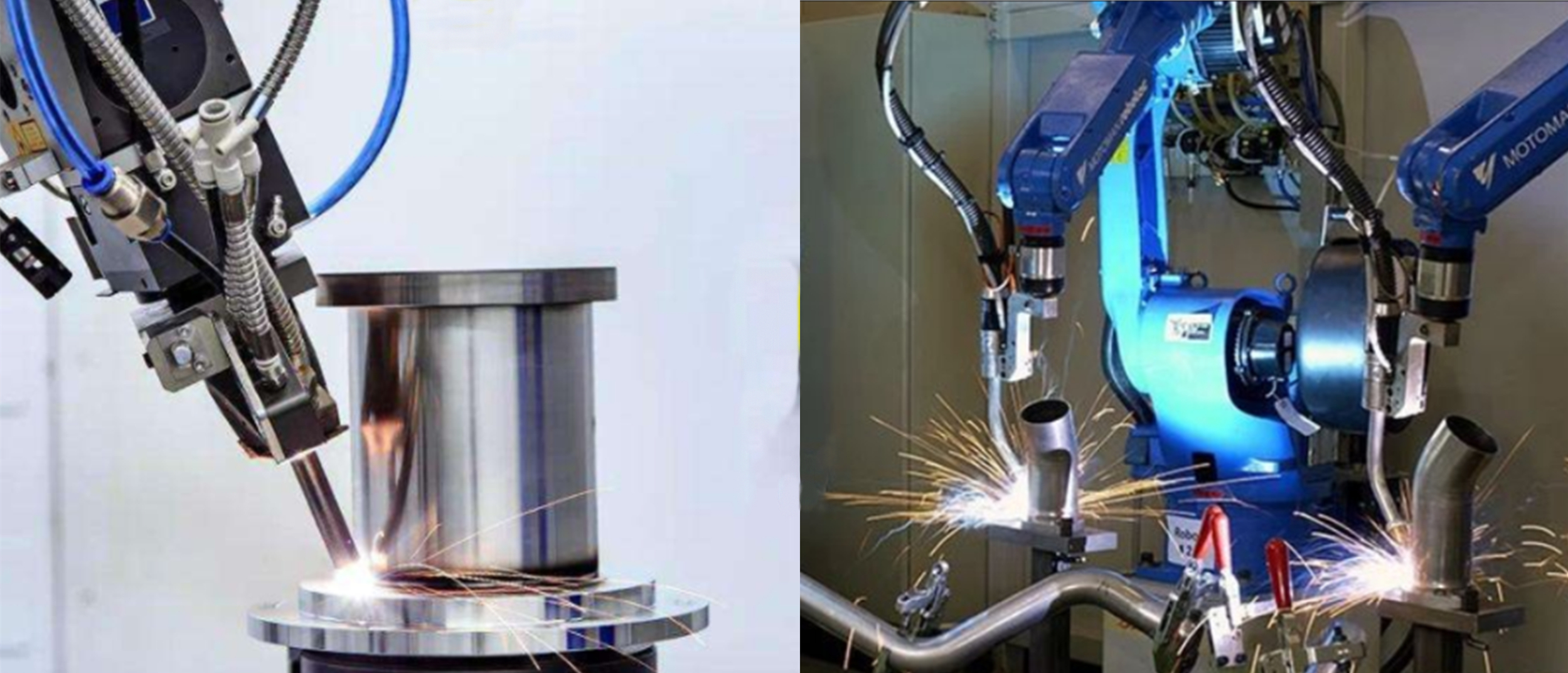
ระบบเชื่อมเลเซอร์หุ่นยนต์ประกอบด้วยหุ่นยนต์เชื่อม เครื่องป้อนลวด กล่องควบคุมเครื่องป้อนลวด ถังน้ำ ตัวปล่อยเลเซอร์ และหัวเลเซอร์ มีความยืดหยุ่นสูง สามารถประมวลผลชิ้นงานที่ซับซ้อนได้อย่างสมบูรณ์ และสามารถปรับให้เข้ากับสถานการณ์ที่เปลี่ยนแปลงของชิ้นงานได้ เลเซอร์...อ่านเพิ่มเติม-
-

ด้วยการประยุกต์ใช้หุ่นยนต์อุตสาหกรรมที่แพร่หลายมากขึ้นเรื่อยๆ หุ่นยนต์เพียงตัวเดียวจึงไม่สามารถทำงานให้สำเร็จลุล่วงได้อย่างรวดเร็วและแม่นยำเสมอไป ในหลายกรณี จำเป็นต้องใช้แกนภายนอกอย่างน้อยหนึ่งแกน นอกจากหุ่นยนต์จัดเรียงพาเลทขนาดใหญ่ที่มีอยู่ในตลาดปัจจุบันแล้ว หุ่นยนต์ส่วนใหญ่ เช่น หุ่นยนต์เชื่อม หุ่นยนต์ตัด หรือ...อ่านเพิ่มเติม-
-

เช่นเดียวกับรถยนต์ หุ่นยนต์ Yaskawa ก็ต้องได้รับการบำรุงรักษาทุกครึ่งปีหรือ 5,000 กิโลเมตร หุ่นยนต์ Yaskawa ก็จำเป็นต้องได้รับการบำรุงรักษาเช่นกัน กำหนดเวลาการทำงานและเวลาทำงานให้ถึงกำหนด การบำรุงรักษาเครื่องจักรและชิ้นส่วนต่างๆ จำเป็นต้องได้รับการตรวจสอบอย่างสม่ำเสมอ การบำรุงรักษาที่ถูกต้องไม่เพียงแต่...อ่านเพิ่มเติม-
-

กลางเดือนกันยายน 2564 เซี่ยงไฮ้เจียเซิงโรบอทได้รับโทรศัพท์จากลูกค้าในเหอเป่ย และพบสัญญาณเตือนจากตู้ควบคุมหุ่นยนต์ยาสคาวะ วิศวกรของเจียเซิงจึงรีบไปที่ไซต์งานของลูกค้าในวันเดียวกันนั้น เพื่อตรวจสอบไม่พบความผิดปกติใดๆ ในการเชื่อมต่อปลั๊กระหว่างวงจรส่วนประกอบและ...อ่านเพิ่มเติม-
-

1. คำจำกัดความ: โดยทั่วไปแล้ว โซนรบกวนจะเข้าใจกันว่าเป็นจุด TCP (ศูนย์กลางเครื่องมือ) ของหุ่นยนต์ที่เข้าสู่พื้นที่ที่กำหนดค่าได้ หากต้องการแจ้งอุปกรณ์ต่อพ่วงหรือบุคลากรภาคสนามเกี่ยวกับสถานะนี้ ให้บังคับส่งสัญญาณ (เพื่อแจ้งอุปกรณ์ต่อพ่วง); หยุดสัญญาณเตือน (แจ้งบุคลากรที่เกิดเหตุ)...อ่านเพิ่มเติม-

www.sh-jsr.com
สินค้าขายดี - แผนผังเว็บไซต์หุ่นยนต์จัดเรียงพาเลท, หุ่นยนต์เชื่อมจุด Yaskawa, หุ่นยนต์เชื่อม, หุ่นยนต์วาดภาพ Yaskawa, หุ่นยนต์พ่นสีอัตโนมัติ, หุ่นยนต์จัดเรียงพาเลท,
รับแผ่นข้อมูลหรือใบเสนอราคาฟรี
เขียนข้อความของคุณที่นี่และส่งถึงเรา